Comparing ublox GNSS module accuracy
posted (updated )
Goals:
- how real are the marketeering numbers from ublox product page
- how good are the accuracy numbers from a ublox module data stream
ublox f9 hps 1.4.0 interface description
What I have to test with
instock PD5140 dc block splitter
antennas
- sparkfun SPK6618H: L1/L2/L5/E6 GPS, GLONASS, Galileo, and BeiDou
- ublox ann-MB-00-00: L1, L2/E5b/B2I GPS, GLONASS, Galileo, and BeiDou
modules
The modules under test are going to be
- ZED-F9R
- IMU & wheel ticks for sensor fusion
- only use if your use case matches one of the profiles:
optimized for automotive, e-scooter, rail vehicle and robotic lawn mower platforms only
- ZED-F9P no imu, better at "centimeter-level" rtk
- NEO-M8P M8 that does "centimeter-level" RTK
actual devices:
- 3x C102-F9R, ZED-F9R devkit unknown firmware
- 1x EVK-F9P-16-00, NEO-F9P/ZED-F9P devkit unknown firmware
- 4x C94-M8P-2: NEO-M8P devkit unknown firmware
Monuments that are nearby
stability A no pictures:
Stability B with picutres:
- mound and 13.5 https://geodesy.noaa.gov/datasheets/passive-marks/index.html?PID=DI6413
- 8 and dequinder.5: https://geodesy.noaa.gov/datasheets/passive-marks/index.html?PID=DI6131
Tests
monument from NGS
static test, with a single antenna on a tripod going to a splitter with all the modules
test both antennas sparkfun and ublox sequentially
- ZED-F9R no imu, CFG-SFCORE-USE_SF=0
- ZED-F9R imu=static
- ZED-F9R imu=static, rtk fixed
- ZED-F9P rtk fixed
outputs
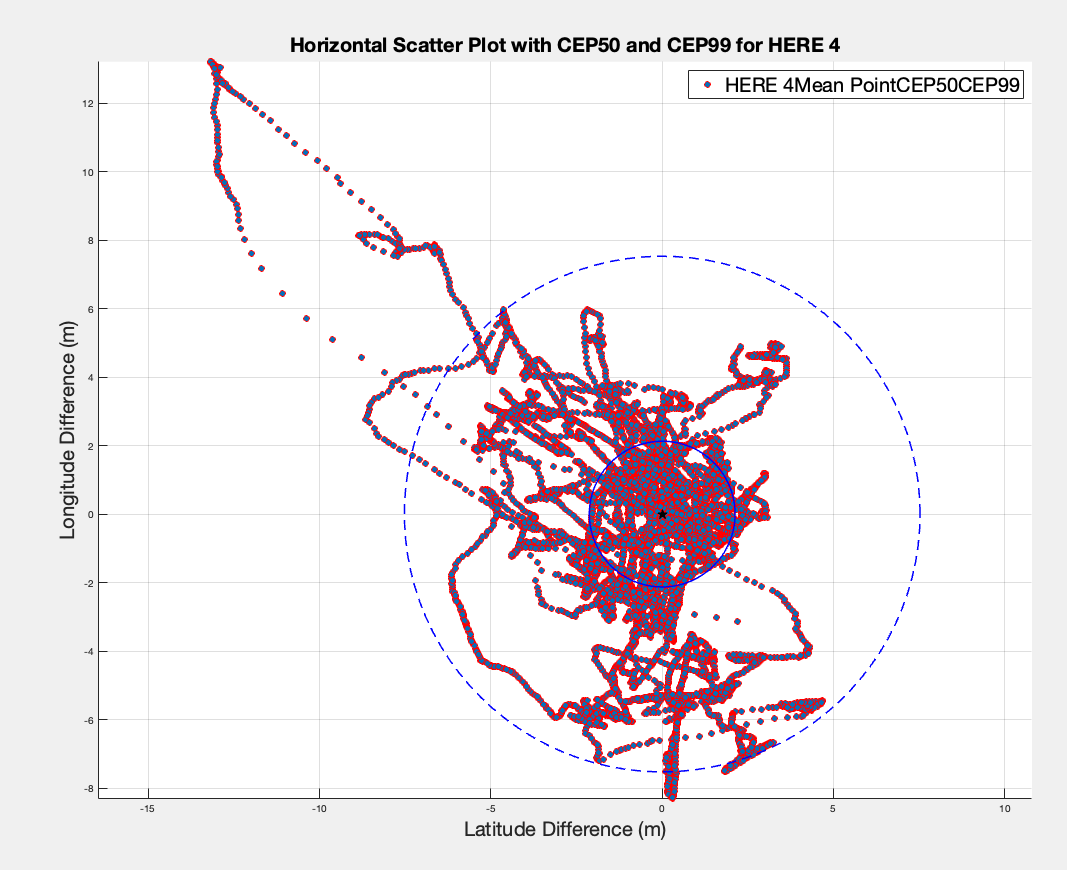
- graph each ublox like
results
- compare location to monument to measure actual accuracy
- compare location + location accuracy to monument to check if location accuracy is correct
starr jc park rails
moving test, with a single antenna mounted to a train going to a splitter to all the modules
test both antennas sparkfun and ublox sequentially
- ZED-F9R no imu, CFG-SFCORE-USE_SF=0
- ZED-F9R imu=rail
- ZED-F9R imu=rail, rtk
- ZED-F9P rtk
I kinda also want to try an M8P with netowrk ntrip vs M8P with local ntrip over 915MHz from a base station that was allowed to settle that would only be ublox antennas though
outputs
- graph of location for each module over time maybe on a map
results
- check how smooth and real the path looks (no jumps, similar elevation)
- compare to satellite photos of rail lines
Test Setup
wheel ticks
TODO: need direction and wheel tick lines from train
Status Lights to make testing possible
- F9R for a light for sensor fusion initialized/initializing
- F9P for a light for rtk off/float/fixed
- M8P for a light for rtk off/float/fixed
maybe accuracy lights for each board like sparkfun has on their kit, 10m, 5m, 1m, 10cm, 1cm?
data flow
ublox -> mcu for status lights ublox -> computer for data logging
log to table of time, module, location, hacc, vacc, sensor fusion status, rtk status, fix status(2d/3d)